I have had the i210 Lidar Pro for just under a week now. My previous robotic mower had a perimeter wire and functioned fine, but the wire would occasionally break during garden work. The breaking point is then quite easy to locate with a small AM radio. I also had to be careful when scarifying to avoid hitting the wire. When the base station failed, I decided to buy a cordless robotic mower.
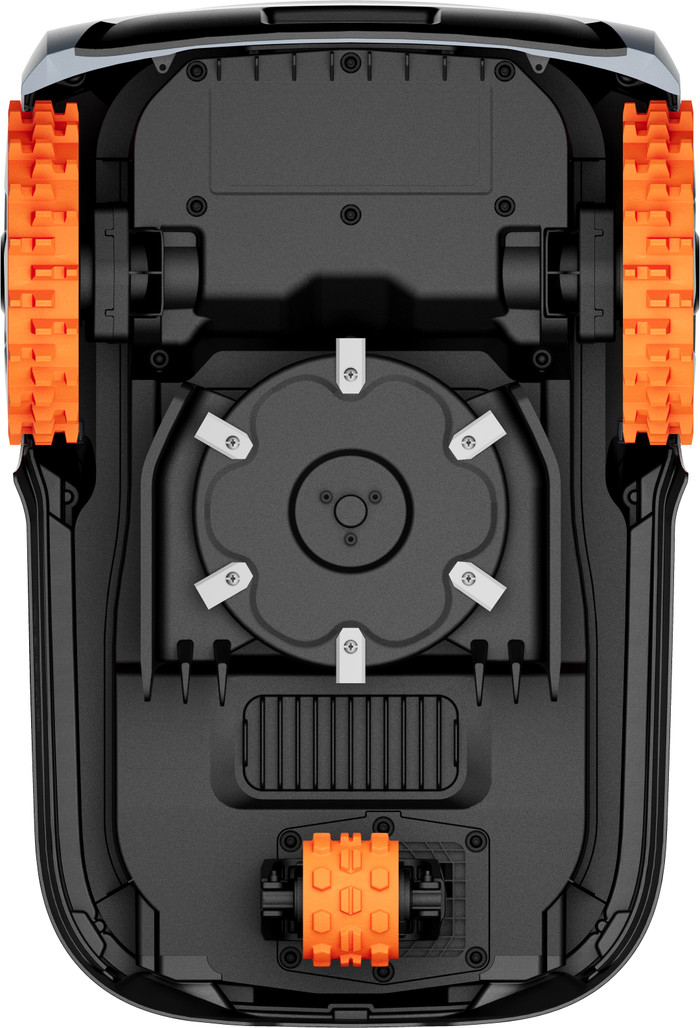
The i210 Lidar Pro was well packaged with the blades already mounted and a set of spare blades included. Battery at start-up was approx. 60%. Getting it ready is simple with good instructions via an online video on the website.
After charging, I drove around the grounds manually to mark the edges using hand control in the app, a bit like with a remote-controlled car. That takes some getting used to, but correcting is easy. Seems well thought out. The mower can also automatically detect the edges; I haven't tried that because one edge of the lawn slopes down into a ditch...
Setting up the schedule, mowing height, efficiency, etc. etc. It is simple in the app. The mowing area can also be adjusted from the app. If desired, the robotic mower can pause during rain and return to the base station.
Mowing and charging once takes me about 2 hours and 10 minutes. The robotic mower mows long lines parallel to each other but sometimes does not finish them and returns later to finish. That behavior is somewhat peculiar, but it works well, although with all that turning it turns, a strip of grass sometimes remains standing when the mower has completely finished the area. However, this is on the 'fast and efficient' setting. I am currently trying out the precise setting, so there are no results from that yet.
According to the Navimow app, I have a total of 771 m² divided over two areas with a passageway in between. The mower can locate the passageway very precisely; this works flawlessly.
During the first few rounds, the mower got stuck a few times on a branch and clumps of mowed grass, but the grass was relatively long. I did not experience any more jamming during subsequent rounds. I haven't tested it with objects yet, but the mower hasn't hit trees or edges.
The mower is sensitive to potholes in the turf; the single front wheel, in particular, gets stuck in them (mole tunnels, etc.). The mowing process stops, but the mower does drive out of them and goes around them. The grass is mowed later from a different angle, though sometimes not at all. My previous robotic mower (with perimeter wire) had four wheels and therefore hardly sank into potholes.
So, the mowing quality could be better, but that is perhaps mainly a matter of settings. Mowing sharply along edges works quite well, but to improve it, I might need to make the edge lines a bit straighter and more precise in the app. As a reasonably tech-savvy person, I appreciate that there are many things to adjust and fine-tune, but for a less tech-savvy person, this mower is also very usable.
All in all, a positive experience, but after only a few mowing sessions; the mower still needs to prove itself further.